1、视觉机械臂开发平台套件 AiNeo
1)视觉机械臂开发平台套件AiNeo简介
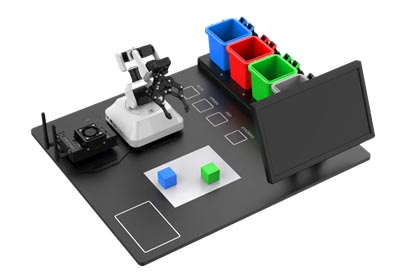
这是基于Jetson Nano开发的ROS视觉机械臂开发平台,集成了智能视觉机械、触摸显示屏及分拣场景道具,采用PyTorch深度学习框架,支持Gazebo仿真及Movelt轨迹规划,能实现物品追踪、抓取、分拣、码等功能。官方提供ROS源码包,有效的降低了调试时间和学习成本,可迅速开展机器视觉、深度学习、机械臂运动控制等项目实验。
单台机械臂尺寸:140*140*440mm
底座尺寸:长*宽600*500mm
搭载Jetson nano主板,ROS操作系统
搭载高清晰度摄像头,通过机器视觉、深度学习和逆运动学控制,可以轻松完成垃圾分类、物品码垛、定位追踪、垃圾分类
采用智能总线舵机,具有电压、位置、温度反馈功能
配备11.6寸显示屏,可以快速进入编程系统,对机械臂进行控制
2)实验案例
AI智能垃圾分类,AiNeo可以通过AI智能识别,来完成智能垃圾分类。我们已经为用户训练好12种垃圾卡片模型,用户也可以利用深度学习来进行更多训练。
AI智能颜色分拣,AiNeo可以对特定颜色的物体进行智能分拣,图像处理采用基于LAB颜色空间的色彩阈值二值化,通过腐蚀、膨胀等操作,实现对物体颜色的提取和识别,然后根据颜色自动分拣并堆叠。
2、机械臂流水线协作系统(带底座)AiNeo
1)机械臂流水线协作系统AiNeo简介

整体尺寸:1300mm*650mm
搭载Jetson nano主板,ROS操作系统
搭载高清晰度摄像头,通过机器视觉、深度学习和逆运动学控制,可以轻松双机协作、物品传送、物品分拣、码垛
搭载可编程电动传送带,用于物品传送
采用智能总线舵机,具有电压、位置、温度反馈功能
配备11.6寸显示屏,可以快速进入编程系统,对机械臂进行调节和控制
开放python源码,开放详细课程资料,方便用户学习
2)实验案例
颜色分拣:1号机械臂通过视觉相机检测到色块位置,把检测区域内的木块夹取放置到传送带上,当木块被运输至2号机械臂检测区域时,2号机械臂对目标色块的颜色进行识别,然后自动分拣并码垛到相应区域。
垃圾分类:1号机械臂通过视觉检测带有垃圾图像的木块位置,对木块进行定位抓取,放置到传送带上,当木块被运输至2号机械臂的检测区域时,2号机械臂通过相机对垃圾木块的图像进行识别,图像已经预先通过深度学习进行训练,2号机械臂根据所识别的卡片信息完成垃圾木块分类。
3、视觉机器狗(4G)RosPug
1)视觉机器狗(4G)RosPug简介
ROSPug是基于ROS系统打造的智能四足机器狗,全身搭载12个高压强磁智能总线舵机,高强度的轻巧机身内,集成了NVIDIA Jetson Nano主控制器、TOF激光雷达、高清摄像头等高性能硬件配置,并内置全自研动态平衡运动学算法,运行轻巧稳定,支持Gazebo仿真,能满足用户对四足运动学算法及路径规划的学习和验证,为SLAM建图导航、路径规划深度学习、机器视觉等二次开发提供快速便捷的集成方案。

躯干外壳长:303mm
躯干宽度:193mm
机身12个自由度,可以完成快走、小跑、转弯、上下坡,台阶攀爬、舞蹈表演等高难度动作
ROS系统,搭载Jetson nano主板,搭载高清摄像头,适合人工智能教育,学习机器视觉算法及仿生步态算法
头部搭载TOF激光雷达,可实现建图导航
采用钢齿轮空心杯舵机,强度高,速度快
2)实验案例
激光雷达建图与导航、KCF目标跟踪、目标识别与追踪、标签识别、手势控制、机身自平衡、激光雷达避障、雷达追踪。
4、视觉人形机器人
(4G)AiNex
1)视觉人形机器人
AiNex简介
全自研的智能人形机器人开发平台,拥有24自由度,采用ROS系统,内置全自研自稳定运动学算法,可以完成行走、攀爬、跨栏、抓取等高难度动作,行走高度、转弯半径均可自由调节。结合头部搭载的AI视觉摄像头,可以完成自主目标追踪、踢球投篮、抓取搬运、上下台阶等任务,支持参加国内外诸多人形机器人赛事,官方提供ROS源码包和详细教学资料,助力高校培养更多人形机器人相关领域人才,弥朴国内双足技术领域研究的短板。

机器人尺寸:193mm*135mm*415mm
场地尺寸:3000mm*3000mm
AiNex视觉人形机器人,共24自由度,可满足国际自主机器人大赛各项要求
搭载树莓派4B主板,ROS操作系统,适合人工智能教育,学习机器视觉算法及仿生步态算法,支持APP控制
搭载高清晰度摄像头,可实现自主踢球、定向巡航、快慢步态调整
采用11.1V 智能高压总线舵机,支持温度、位置反馈。
带有防堵转开合手掌,可以对目标物品进行抓取
头部搭载2自由度云台,可以快速追踪定位目标物位置,并实现自动追踪
采用3500mah高容量电池,支持正常使用条件下1个小时以上的续航
★适用于中国工程机器人大赛、国际自主机器人大赛、国际先进机器人大赛、广西自治区人工智能设计大赛、江苏省大学生机器人大赛
2)实验案例
上下台阶:通过摄像头模块自主识别黄线,完成自主上下台阶的功能。
自主巡线:通过视觉自主识别黑色或者彩色线条,并巡线行驶。
矮门穿越:通过摄像头模块识别矮门,机器人调节成矮姿态,完成矮门穿越功能。
自主踢球:通过摄像头识别紫色小球,并自主识别门框位置,完成自主射门功能。
自主抓取搬运:通过摄像头识别色块,并自行判断色块位置,完成自主抓取并搬运的功能。
5、交互式六足机器人
(含语音)套件ROSpider
1)交互式六足机器人
ROSpider简介
ROSpider是一款全地形ROS六足机器人开发平台,六足底盘集成了18个45KG高压总线舵机,机器人内置高级仿生运动学步态算法,并搭载了激光雷达和3D深度相机,通过对周围环境的勘测扫描,具有灵活的机动性和适应性。作为一款高性能边缘智能机器人ROSpider机器人可以完成物品识别追踪、体感交互、SLAM建图导航、路径规划、语音导航等ROS实训项目,助力高校培养更多人工智能相关领域人才。

躯干外壳长:25cm
躯干外壳宽:14cm
单条腿旋转半径:26cm
伸展姿态最大宽度:约75cm
搭载Jetson nano主板,ROS操作系统
搭载思岚S2L激光雷达、深度相机、支持三维建图导航
底盘采用18个45kg扭力高压总线舵机,支持温度、位置反馈
支持深度视觉识别、支持人体特征识别,体感控制
支持狭缝穿越、SLAM建图、自主导航、群控编队
搭载RGB灯环和OLED显示屏,用于数据反馈
搭载环形六麦克风阵列,可实现远场语音识别控制
2)实验案例
RTAB-VSLAM三维视觉建图与导航、激光雷达建图与导航、KCF目标跟踪、群控编队、目标识别与追踪、标签识别、手势识别、体感控制、机身自平衡、激光雷达避障、雷达追踪、远场声源定位、语音识别、语音导航。
6、智能视觉车套件ROSOrin
1)智能视觉车套件ROSOrin简介
ROSOrin多模态ROS机器人是轮毂驱动一体化的复合型ROS开发平台,提供了多场景应用和实训方案,配套ROS课程,适用于机器人教育、功能研发、产品开发等需求。通过集三种运动模态于一体的底盘设计,实现多模态快速切换,搭载高性能硬件配置,可满足您对复合型机器人的学习和验证。

整机尺寸:275mm*211mm*165mm
搭载Jetson nano主板,ROS操作系统
可快速进行阿克曼、麦轮、差速三种底盘之间的切换(阿克曼、麦轮、差速三种底盘可选)
搭载激光雷达,可实现追踪避障,通过多种方式完成二维SLAM建图
底盘采用大扭矩编码电机和赛事级麦克纳姆轮
搭载深度相机,支持深度图像与RBG图像获取。
支持多传感器联合实现三维SLAM建图、自主导航
搭载环形六麦克风阵列,可实现远场语音识别控制。
2)实验案例
RTAB-VSLAM三维视觉建图与导航、激光雷达建图与导航、KCF目标跟踪、颜色识别、标签识别、手势识别、AR视觉、自主巡线、体感控制、激光雷达避障、雷达追踪、远场声源定位、语音识别、语音导航、语音控制颜色识别
7、移动复合机器人套件ROSLander2024/赛事训练场地
1)移动复合机器人套件ROSLander简介
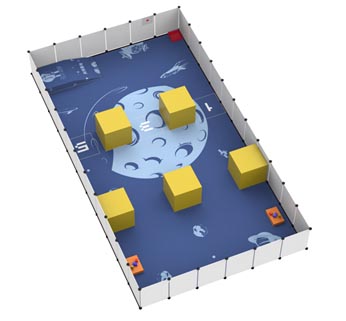
ROSLander是一款多模态的ROS教育机器人开发平台,通过创新性的机械设计,支持麦克纳姆轮底盘、差速轮两种运动模式的快速切换。它还集成了Jetson Nano、高精度激光雷达、3D深度相机、智能视觉机械臂等高性能配件,可以建立建图导航、无人驾驶导航搬运等多场景模拟教学和演示,为SLAM导航算法、机器视觉、深度学习、机器人运动控制等二次开发提供快速便捷的集成方案,适用于人工智能机器人技术、无人驾驶技术的教学实验、科学研究、创新实践。

整机尺寸:312mm*252mm*497mm
地图尺寸:3920*2160mm
搭载3D视觉机械臂,可根据深度信息完成精准探测、抓取
配置高精度TOF激光雷达、双深度相机
可快速进行麦轮、差速两种底盘之间的切换(麦轮、差速两种底盘可选)
采用赛事级高强度麦克纳姆轮,尼龙+纤材质
搭载Jetson nano主板+STM32小车控制板,支持主控升级
搭载环形六麦克风阵列,可实现远场语音识别控制
动力系统采用大扭矩编码电机,配备独立驱动模块
★适用于中国机器人及人工智能大赛、中国工程机器人大赛、国际先进机器人大赛
2)实验案例
坡道行驶:小车可通过机械臂上的3D深度相机,探测前方道路,进而调整机身行驶角度实现自主上下坡道。
自主导航搬运:小车可在“月球探索”赛事地图中实现自主导航搬运,自主完成路径规划、动态避障、三维空间抓取等任务
图像识别与追踪:通过深度学习技术,基于YOLOv5框架,对目标物品进行自主训练,进而实现图像识别。通过逆运动算法进行目标追踪。
语音交互:小车可通过6路麦克风阵列实现声源定位、语音唤醒和语音识别。再通过机载扬声器,进行语音回复,可设置播报内容。
RTAB-VSLAM三维视觉建图与导航:运用RTABSLAM算法,小车融合视觉和雷达数据可构建三维彩色地图,并在三维地图中自主导航避障。
激光雷达二维建图与导航:小车可利用激光雷达,融合编码器及IMU完成高精度二维建图,还支持路径规划,定点导航,导航中避障。
8、轮式搬运机器人套件
ROStarter2024
1)轮式搬运机器人套件

ROStarter2024简介
整机尺寸:312*252*282(mm)
搭载Jetson nano主板+STM32小车控制板,支持主控升级
搭载激光雷达、深度相机和触摸屏,可以快速进入编程系统
底盘采用大扭矩编码电机和赛事级麦克纳姆轮
可快速进行麦轮、差速两种底盘之间的切换(麦轮、差速两种底盘可选)
支持SLAM建图、自主导航、群控编队
搭载环形六麦克风阵列,可实现远场语音识别控制
2)实验案例
RTAB-VSLAM三维视觉建图与导航、激光雷达建图与导航、RRT自主探索建图、KCF目标跟踪、自动驾驶、群控编队、目标识别与追踪、AR标签识别、视觉图像美化、AR增强现实、激光雷达避障、雷达追踪。








